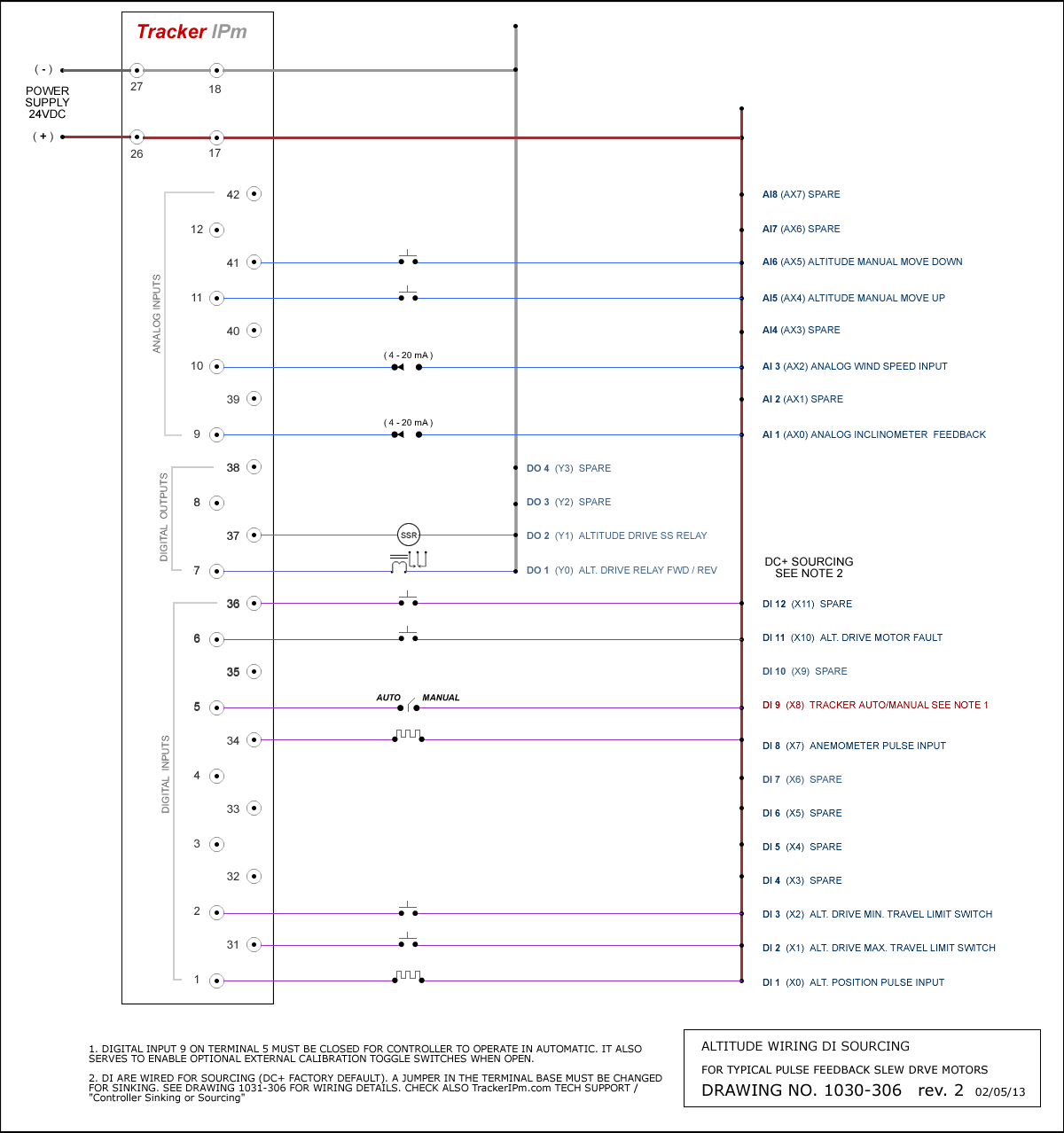
Complete Wiring & Power Up the Tracker IPm

Down Load Tracker IPm Configuration Software
To begin with, down load the I/O Tool Kit software and install it on your Windows PC.
You will be sent a TRACKERvxxx.6PJ project file and a registration file by email. Save them in an accessible folder on your PC. The best location would be C:/Program Files/SixnetTools/Projects
Run I/O Tool Kit
Install Registration
File / Import / Registration Info…
Go to the folder where you placed the registration file. Select the file then Open / OK / Close pop-up
Open Project
File / Open Project
Go to the folder where you placed the project file. Select the file then Open
Connect to the Tracker IPm through a Serial Connection
Connect the RS232 port of your PC to the System RS232 Port B of the Tracker IPm. Most new PCs sold today no longer have the 9 pin serial port but a serial to .usB converter is readily available from your local computer score.
.use the RJ45 to RS232 converter that comes in the box with the Tracker IPm to connect an RJ45 patch cable to the RS232 Port B found on the top of the controller.
This is the recommended method to configure your Tracker IPm beca.use it allows connection without IP address issues sometime found on local networks. IC Systems can better provide direct support if your Ethernet port is free to access the Internet.
Device / Select…
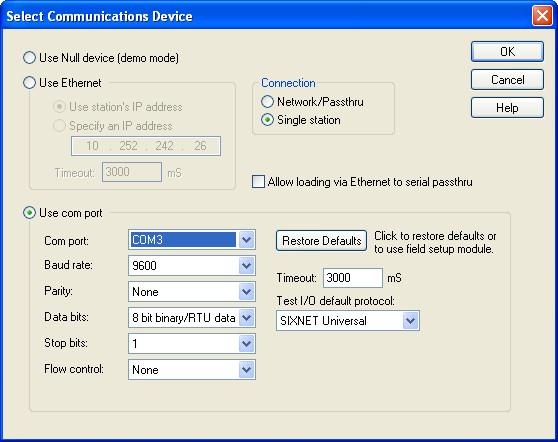
fig. 1 Click for enlarged view
Select the radio button “.use com port”
See Figure 1. to the right. The only change you may need to make may be the COM number. See the drop down for all detected ports. OK
Connect to the Tracker IPm through an Ethernet Connection
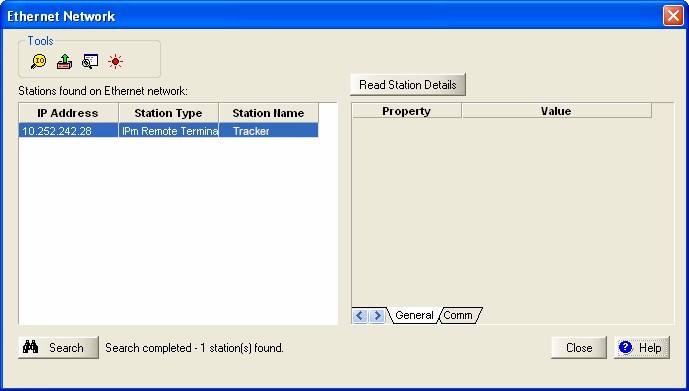
fig. 2 Auto connect Click for enlarged view
Tracker IPms are generally shipped with the Ethernet port configured for DHCP. If your local network requires a static IP address, then you will not be able to connect. For the initial configuration, you should determine the IP address assigned by your router by .using the auto connect tool shown to the right.
To discover the IP address: Operations / Auto Detect EtherTRAK Stations…
If you are unable to easily connect to the Tracker IPm then it is highly recommended to connect by serial cable as previo.usly described.
To continue : Device / Select…
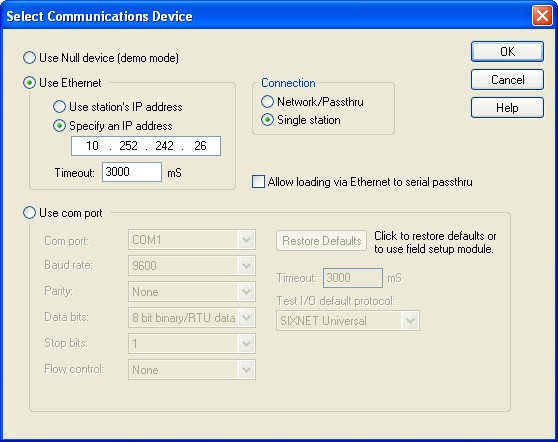
fig. 3 Click for enlarged view
Select the radio button “.use Ethernet”
See Figure 3. to the right. Enter the IP address. OK
____________________________________________________________________
Set Motor Operating Parameters
Operations / Test I/O
The pop-up is represented in Figure 4 which has been cropped to fit this document. At the bottom, the TD & RD LEDs are represented. If they are not indicating communications, then you are not communicating with the Tracker IPm and this will time out with an error.
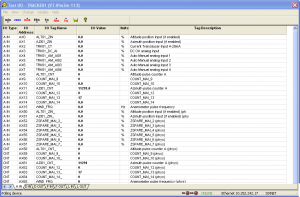
fig. 4 Click for enlarged view
There are a number of Tabs at the bottom which this document will have you select to view or set parameters.
Set the Pulses Per Rotation
Select Tab L IN
Unless your Tracker IPm came from the factory preconfigured you m.ust do the following:
See Figure 5. ALT01_PPR and AZI01_PPR represents the number of pulses over a 360 degree rotation for Altitude and Azimuth respectively.
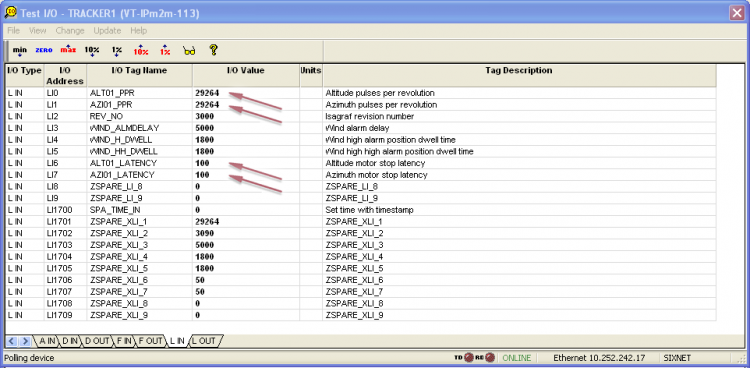
Some drives provide this number. The tracking hardware does not need to rotate 360 degrees, it is a theoretical number.
________________________________________________________________________________
Example- A Kinematic 3″ Slew with a br.ush motor has the following specifications:
Motor pulses per full rotation: 2:1
Planetary Gear ratio: 236:1
Worm Gear: 62:1
Total Pulses Per Rotation = 2 x 236 x 62 = 29,264
________________________________________________________________________________
High light the I/O Value you wish to change, type in the new number. Enter
Also shown is ALTITUDE & AZIMUTH Latency. Leave these at the default 100 for now. These are .used to tune large trackers to prevent overshooting the desired position.
Set Location Parameters
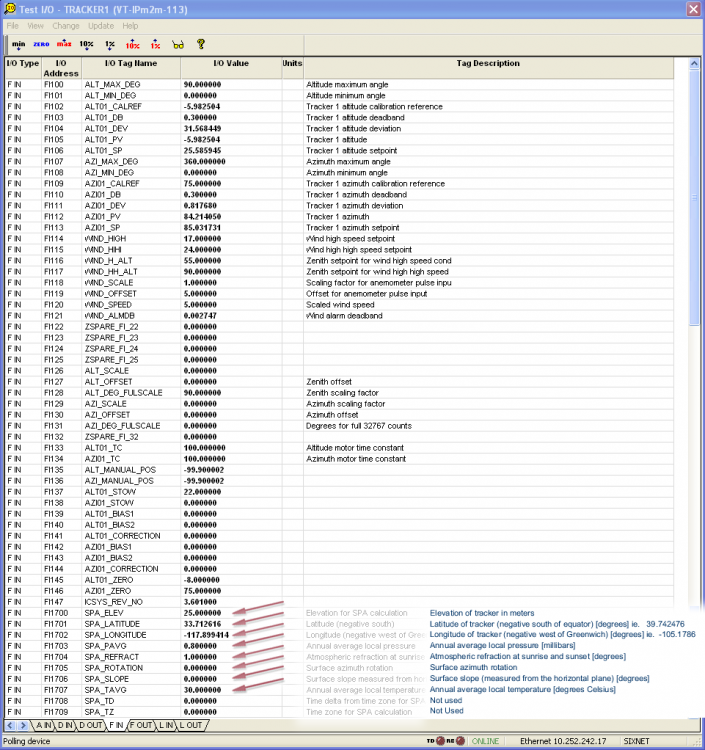
Select Tab F IN
See Figure 6. Arrows indicate “Required Information”
- SPA_ELEV Elevation in meters (zero for sea level)
- SPA_LATITUDE Latitude in decimals
- SPA_LONGITUDE Longitude in decimals
- SPA_PAVG Average local pressure in millibars (ie 1013 at sea level)
- SPA_REFRACT Atmospheric refraction at sunrise and sunset (.usually 1)
- SPA_ROTATION Surface azimuth rotation (.usually zero)
- SPA_Slope Surface slope measured from horizontal (.usually zero)
- SPA_TAVG Average local temperature (ie 30 deg C)
- SPA_TD Not required
- SPA_TZ Not required
High light the I/O Value you wish to change, type in the new number. Enter
Set Limits and Operational Parameters
Continue on Tab F IN
See Figure 6a Arrows indicate “Required Information”
Soft Limits
Soft limits will limit the tracker’s travel through software. If the calibration is in correct then the soft limits will be off by the same amount. You should always .use mechanical limit stops to prevent over travel and damage to the tracker.
Soft limits can be set inside or outside the travel range of the mechanical limits. There are good reasons to .use either strategy.
Inside will save wear on the limit switch mechanisms however if you intend to .use the Auto Cal Option then the soft limit for the minimum travel for both altitude and azimuth m.ust be outside the minimum mechanical switches. You can configure soft limits differently for both minimum and maximum travel.

- ALT_MAX_DEG default 90 deg. sets maximum upward travel limit
- ALT_MIN_DEG default is zero, sets minimum upward travel limit (can be a negative number)
- ALT_DB default is 0.2, sets the difference between the sun’s AL location and the tracker in degrees before a movement is made (smaller is more accurate but runs the motor more often)
- AZI_MAX_DEG default 360 deg. sets maximum Westward travel limit
- AZI_MIN_DEG default is zero, sets minimum Eastward travel limit
- AZI_DB default is 0.2, sets the difference between the sun’s AZ location and the tracker in degrees before a movement is made (smaller is more accurate but runs the motor more often)
If you wish to utilize Auto Calibration do not enter a value for soft limits that would prevent the Tracker from contacting the minimum travel limit switches. See Auto Calibration section.
Analog Position Input
The present position of the drive can be determined from a pulse input (e.g., a Hall sensor) or from an analog input. If you are .using an analog feed back to position one or both of your motors enter the Scale Factor.
- ALT_SCALE
- ALT_OFFSET
- AZI_SCALE
- AZI_OFFSET
The analog inputs are 4-20 mA channels with a raw range of 0-32767. Example; a 90 deg inclinometer which is 4mA at Zero degrees and 20mA at 90 degrees would be 0.0027467 (90/32767).
If you have 4mA at Zero degrees and 20mA at 360 degrees then your Scale Factor would be 0.0109866 (36/32767).
SCALE determines the span of travel based on the signal. OFFSET is a constant in degrees which allows the .user to adj.ust the starting point or the Zero Position.
PV = SCALE * RAW_INPUT + OFFSET
Note: .using analog inputs m.ust be enabled by turning ON this option on Tab D I. The controller will accommodate one Axis being analog and the other pulse DI.
- ALT_ANALOG
- AZI_ANALOG
Sunset Stow Position
If you wish to have the Tracker go to a predefined position at sunset, enter the position in degrees. Enter -1 to stay in last position at sunset. If you wish to utilize Auto Calibration at each sunrise do not enter a value that would prevent the Tracker from making the minimum travel limit switches. See Auto Calibration section.
- ALT01_STOW
- AZI01_STOW
Soft Calibrate
Select Tab D OUT
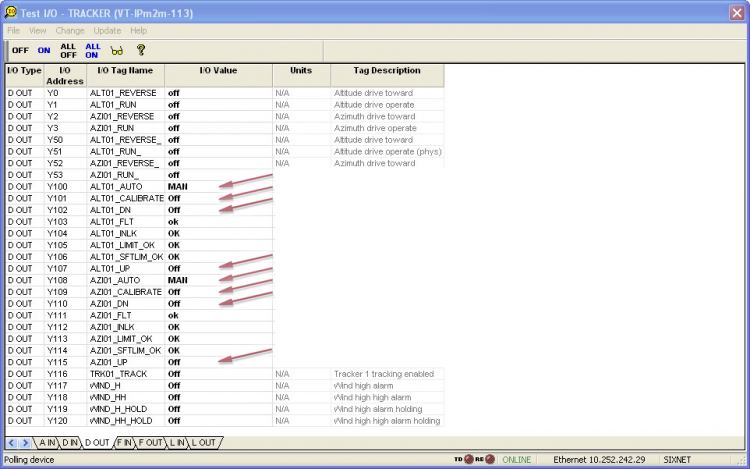
See Figure 7. The Tracker IPm is shipped in the manual mode for both Azimuth and Altitude. In order to calibrate, the following registers should read
- ALT01_AUTO MAN
- ALT01_CALIBRATE ON
- AZI01_AUTO MAN
- AZI01_CALIBRATE ON
To change the I/O Value, simply high light the register and toggle by clicking the OFF – ON at the top left of the pop-up.
To adj.ust the position the tracker is pointing, toggle the OFF – ON at the top left of the pop-up for these registers.
- ALT01_UP Moves the altitude drive towards the horizon 90 degrees*
- ALT01_DN Moves the altitude drive towards the zenith 0 degrees*
- AZI01_UP Moves the azimuth drive towards the west (in the northern hemisphere)*
- AZI01_DN Moves the azimuth drive towards the east (in the northern hemisphere)*
*(The UP & DN nomenclature is based on degrees, yet is counter intuitive to the .user. This will be changed in the next software revision)
See also AUTO CAL
Start Tracking
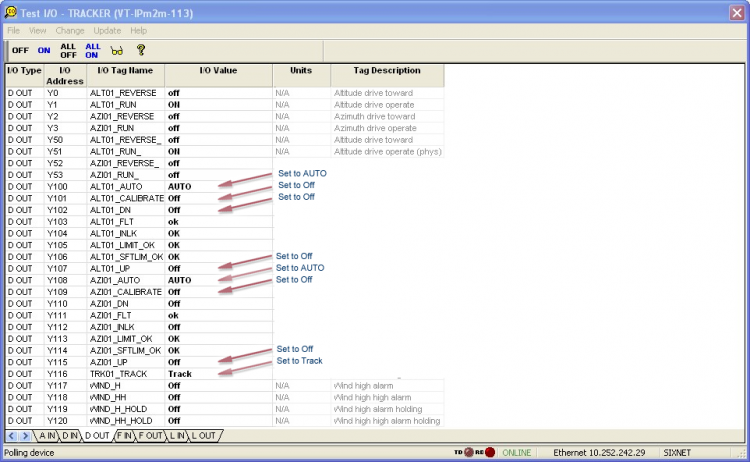
It is recommended that once you have calibrated one axis, you put it into service before calibrating the other axis. To start tracking, the registers should read
- ALT01_CALIBRATE OFF
- ALT01_AUTO AUTO
- AZI01_CALIBRATE OFF
- AZI01_AUTO AUTO
- TRK01_TRACK Track – This enable the SPA calculation and would not need to be turned off for calibration
Close the tool kit. The values are retained in non-volatile memory in case of a power loss. You should be tracking…