Set Operating Parameters – Position Feedback
Applies to Legacy Versions 1060 & 1200
Not applicable to Series 2400
Operations / Test I/O
The Tracker IPm is a closed loop system which means it requires a position feedback in order to operate. It can be configured to accept motor pulse or 4-20mA analog position feedback. You can easily select a combination as well for those who have pulse feedback for the Azimuth motor but want an inclinometer with a 4-20mA output for the Altitude feedback.
Use the Test I/O to configure parameters in the Tracker IPm.
At the bottom of this pop-up, the TD & RD LEDs are represented. Rapid blinking indicates communications with the Tracker IPm otherwise it will time out with an error message. If you have difficulties communicating, make sure the Tracker IPm is powered and connected properly to the network or serial cable.
Set the Pulses Per Rotation
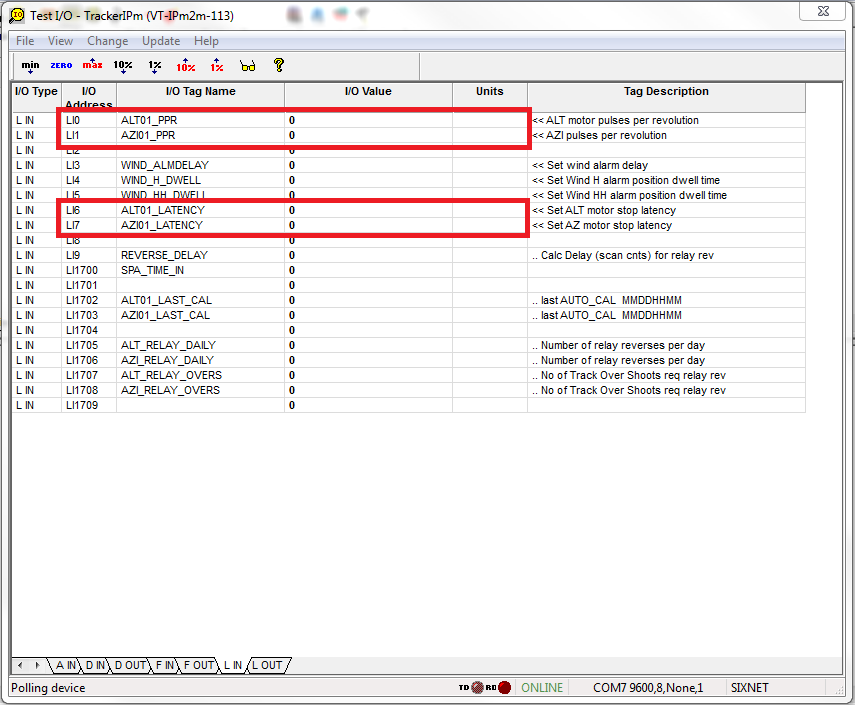
Select Tab L IN
Unless your Tracker IPm came from the factory pre-configured you must do the following:
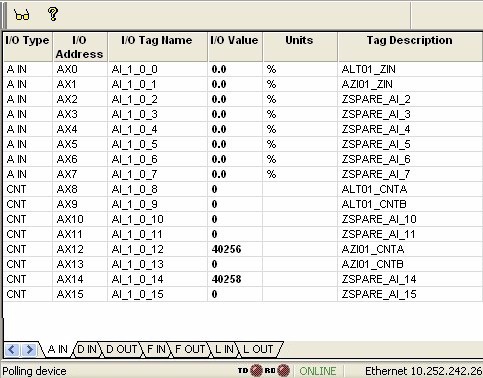
See the Figure below. ALT01_PPR and AZI01_PPR represents the number of pulses over a 360 degree rotation for Altitude and Azimuth respectively. The tracking mechanism does not need to rotate 360 degrees, it is just a theoretical number. For Single Axis PV or Parabolic Trough disregard the I/O Tags beginning with AZI01.
________________________________________________________________________________
Example- A Kinematics 3″ Slew Drive with a brush motor has the following specifications:
Motor pulses per full rotation: 2:1
Planetary Gear ratio: 236:1
Worm Gear: 62:1
Total Pulses Per Rotation = 2 x 236 x 62 = 29,264
High light the I/O Value you wish to change, type in the new number. Enter
While on this Tab, the ALT01_LATENCY & AZI01_LATENCY are advanced settings to tune larger tracking systems to prevent over shooting the target position due to momentum. For now a default setting of 100 is recommended.