Calibration 2 Axis – Cloud
Tracker Version – using GRIDview
This assumes that all Location (here) and both axis Motor set up has been completed (instructions using: Sixnet Toolkit, or IPWebcontrol), wiring is completed and you are ready to track the sun.
- Connect your Tracker to the Internet via the Ethernet port on the top of the module.
- Make certain that your network supports DHCP and allows browsing. If not see your network administrator.
- Log on to your Web Control Account here.
- In the dash board, select the Tracker IPm you wish to set up and make certain it is ONLINE. If not check that you have plugged your CAT5 Ethernet cable into the Ethernet port on the top right and not the RS232 port on the left. (Common mistake). Also note that it may take a few minutes to come online after plugging in the Cat5 cable.
- The CURRENT STATUS (HOME) page should open automatically. If not email support@trackeripm.us with the Serial Number stating “Home Page will not open”.
- Below the main section there should be the navigation buttons. Select Control & Calibration.
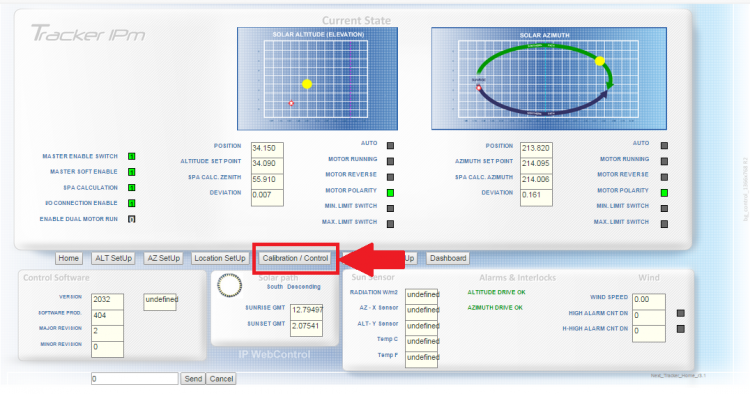
- Make certain that you have hard wired a switch or jumper wire between terminal 5 and +17. The Tracker will not run without this circuit closed. Success is indicated by DI 9 LED lit on the controller faceplate and “Tracker Enabled” on the web page.
- Make sure AUTO is off for both Azimuth and Altitude (boxed in red, green indicator means it is on, grey means it is off)

- For each axis enter a value for the current position in the Force Pv Present Value field (boxed in red). For azimuth 90 degrees is due East and 270 is due West. For Altitude 0 degrees points at the horizon and 90 degrees straight up.
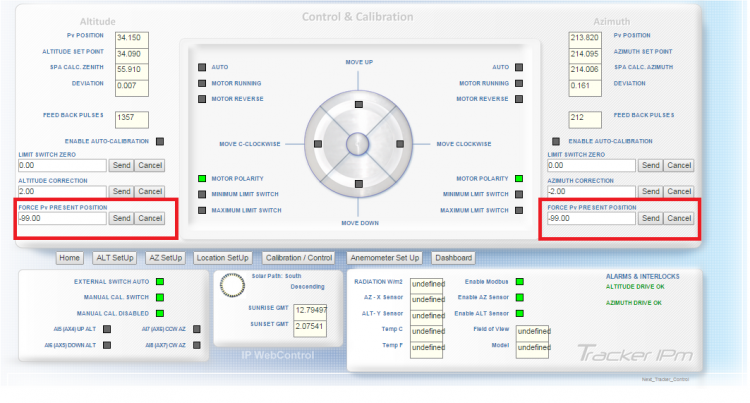
- Locate the Altitude solar collector so that it is pointing straight up and it is plumb using a digital level, enter 90.0 It is OK to estimate the position if you do not have a way to measure position accurately.
- After the value in this entry field is passed to the Pv it will return to -99 but the Pv will now reflect the new value of 90.0 degrees.
- For Azimuth, you may be pointing due South so enter 180.0
- Now that your Present Values Pv approximates the tracker actual position, move the Azimuth motor East until the lower limit switch changes state and the motor stops. You may adjust the limit switch position to reach desired settings by toggling East and West.
- Note the Pv for Azimuth and enter it into AZI01_ZERO (boxed in red). After inputting the desired value press send.
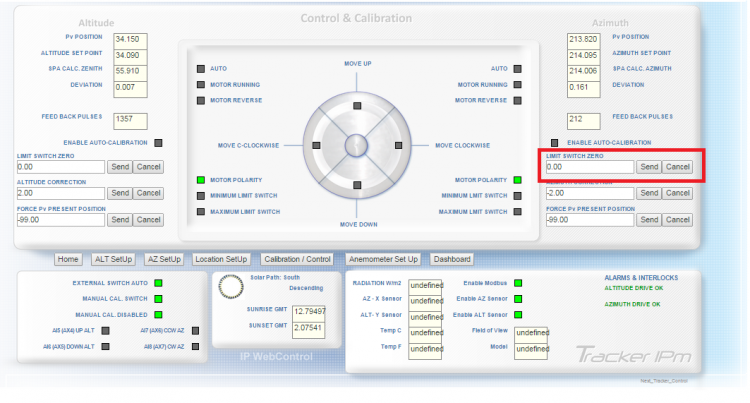
- Put Azimuth into AUTO , it should begin tracking.
- If Azimuth is not On Sun then enter a plus or minus value in degrees in the AZI01_CORRECTION field (directly under the Limit switch zero adjustment) until there is no error. Note that you must hit “send” for these values to register with the tracker. Azimuth calibration is complete.
- Move the Altitude motor Down until the lower limit switch changes state and the motor stops. You may adjust the limit switch position to reach desired settings by toggling Up and Down.
- Note the Pv for Altitude and enter it into ALT01_ZERO (boxed in red). After inputting the desired value press send.
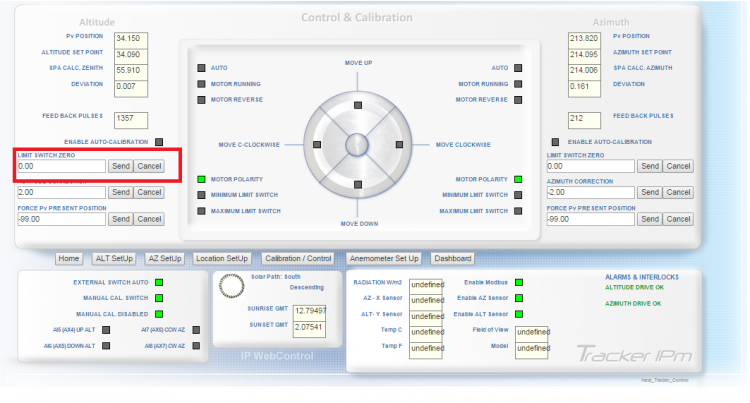
- Put Altitude into AUTO , it should begin tracking.
- If Altitude is not On Sun then enter a plus or minus value in degrees in the ALT01_CORRECTION field (directly under the Limit switch zero adjustment) until there is no error. Note that you must hit “send” for these values to register with the tracker. Altitude calibration is complete.